Über den Autor

Priv.-Doz. Dr. Sigmar Frank Schnutenhaus MSc
Zentrum für Zahnmedizin Dr. Schnutenhaus MVZ GmbHBreiter Wasmen 10
78247 Hilzingen
Germany
07731 182755
info@schnutenhaus.de
http://www.schnutenhaus.de
Co-Autoren
Valerie von Koenigsmarck, Sarah Blender, Laura Ambrosius, Ralph G. Luthardt, Heike Rudolph
Genauigkeit von hülsenlosen 3D-Bohrschablonen für die Insertion von einteiligen Keramikimplantaten – Eine prospektive klinische Studie
Thema
Die Insertion von Implantaten mittels schablonengeführter Chirurgie ist ein etabliertes Verfahren. Die statische Navigation beruht momentan auf in Schablonen integrierten Hülsen, durch die passende Bohrer geführt werden. In dieser klinischen Studie soll ein neues, hülsenloses System auf die Genauigkeit der Implantatinsertion von einteiligen Keramikimplantaten geprüft werden.
Ziel einer erfolgreichen Implantation ist die langzeitstabile Verankerung des Implantats im Knochen als Ersatz einer Zahnwurzel, um Unter- und Oberkiefer prothetisch mit festsitzendem oder herausnehmbarem Zahnersatz wiederherzustellen. Unabdingbar sind dabei einerseits die Schonung aller anatomischen Nachbarstrukturen und gleichzeitig das Anstreben einer möglichst günstigen Platzierung mit entsprechendem Austrittspunkt des Implantats in Position und Höhe, damit das spätere prothetische Ergebnis funktionell und ästhetisch einwandfrei ausfallen kann.
Um ein präzises Ergebnis der Implantatposition zu gewährleisten, kann die Implantatinsertion mittels eines statisch navigierten Verfahrens erfolgen. Sie besteht darin, nach dreidimensionaler Planung mithilfe eines CT- bzw. DVT-Datensatzes die Information der virtuellen Implantatposition auf eine Schablone zu übertragen und das Implantat dann unter Zuhilfenahme dieser Schablone zu inserieren. Im Idealfall sitzt das Implantat später an dem virtuell geplanten Ort im Knochen, wodurch eine ideale Ausgangsituation für die prothetische Restauration geschaffen wird. Es wurde gezeigt, dass die Verwendung einer Schablone Ungenauigkeiten in der Übertragung von geplanter und erzielter Implantatposition im Vergleich zur freihändigen Implantation reduziert.1-4
Die Technologie der schablonengestützten Implantologie ist potenziell vorhersehbarer und weniger invasiv als das herkömmliche Inserieren von Implantaten, dennoch muss kritisch untersucht werden, wie gut sie sich in der Praxis bewährt.5 So können Ungenauigkeiten bei allen diagnostischen und therapeutischen Schritten auftreten. Die einzelnen Komponenten müssen so präzise wie möglich funktionieren, damit das Resultat aus der Summe der Fehler am Ende eine klinisch tolerable Abweichung der Implantatposition ergibt. Ein systematischer Review von Tahmaseb et al. (2014) beinhaltet 24 Studien, die die Genauigkeit der statisch navigierten Implantation untersuchten. Im Durchschnitt bewegen sich die Abstände der Implantatpositionen im Bereich von 1.1 mm am krestalen Implantatende und 1.4 mm am apikalen Implantatende. Die durchschnittliche Winkelabweichung beträgt durchschnittlich 3.9 Grad.6 Einige Studien befassen sich mit dem Einfluss des Herstellungsverfahrens einer Schablone auf die erzielte Genauigkeit, die hier einen Einfluss aufweisen.7-9 Andere Studien belegen den Einfluss der unterschiedlichen Lagerung einer Schablone auf die Genauigkeit. Als weitere Einflussfaktoren auf die erzielbare Genauigkeit werden die Lückenarten, die Restbezahnung, das verwendete Implantatsystem und das chirurgische Vorgehen, wie Flap vs. flapless oder delayed vs. immediate placement aufgeführt.5-18 Des Weiteren wurde untersucht, wie sich die Genauigkeit der schablonengestützten Implantation generell im Vergleich zur freihändigen Implantation verhält.1-3,19,20
Die Komplexität der präimplantologischen Planung ist bei einteiligen Implantaten systemimmanent höher. Bei einteiligen Implantaten kann weder durch den Zweiteingriff der Implantatfreilegung das Weichgewebe ausgeformt, noch können Fehlpositionierungen der Implantate durch entsprechende Abutments korrigiert werden. Diese vermeintliche Schwäche lässt sich jedoch mit einem konsequenten Backward Planning, mittels einer prothetisch orientierten 3-DPlanung und der schablonengeführten Implantatinsertion umgehen. So können potenzielle Vorteile von einteiligen keramischen Implantaten auch in komplexeren Fällen genutzt werden. Vorteile können beispielsweise in der Vermeidung von technischen Komplikationen liegen. Im Vergleich zu zweiteiligen Systemen können Probleme wie Schraubenlockerung, Mikrobewegungen oder Mikrospalten der Abutments nicht auftreten.21-23 Als biologischer Vorteil kann die Vermeidung vom mehrfachen Wechsel der Implantataufbauteile genannt werden.24
Ziel dieser Untersuchung war es, die Genauigkeit der Implantinsertion mittels einer hülsenlosen Bohrschablone zu untersuchen. Als Hypothese wurde formuliert, dass sich die klinisch erzielbare Implantatpositionierungsgenauigkeit im Vergleich zu etablierten Schablonensystemen mit Hülsen nicht unterscheidet.
Material und Methode
Diese Studie wurde als prospektive klinische Studie geplant und durchgeführt. Das Vorgehen und alle verwendeten Materialien wurden der zuständigen Ethikkommission vorgelegt und von ihr genehmigt (Ethikkommission der Universität Ulm, Antrag Nr. 268/17, Genehmigung am 24.08.2017). Die Studienregistrierung erfolgte im German Clinical Trials Register.
Zwölf Patienten, bei denen der Ersatz eines fehlenden Zahns oder mehrerer fehlender Zähne im Ober- oder Unterkiefer durch eine implantatprothetische Versorgung geplant war, nahmen an der Studie teil.
Patienten, welche mit keramischen Implantaten versorgt werden wollten und folgenden Planungsbefund aufwiesen, wurden aufgenommen:
- Schaltlücken oder Freiendsituationen im Ober- oder/und Unterkiefer
- Die Extraktion lag mindestens drei Monate zurück.
- Die Schablone musste zahngetragen sein. Dazu mussten im zu implantierenden Kiefer mehr als fünf Restzähne vorhanden sein.
- Es galten die allgemeingültigen Ein- und Ausschlussgründe.
Behandlungsprotokoll
Zur Implantatplanung, Feststellung der anatomischen Strukturen und der Planung eventuell notwendiger augmentativer Maßnahmen wurde eine DVT-Aufnahme angefertigt. Zudem wurden Situationsmodelle der Kiefer mit Alginat hergestellt.
Planung der Implantatposition
Die Implantatposition wurde mit der Implantatplanungssoftware SMOP (Swissmeda, Zürich, Schweiz) virtuell geplant. Die Planung erfolgte für die Insertion von einteiligen Keramikimplantaten (ceramic.implant, vitaclinical, Bad Säckingen, Deutschland). Dabei wurde eine epi- bzw. leicht subkrestale Insertionstiefe (max. 0.5 mm) bezogen auf den krestalen letzten Schraubengang, vorgesehen.
Für die Planung der Implantatposition wurden folgende Datensätze verwendet: die Modellsituation, prothetische Planung nach Aufstellung eines Konfektionszahns zum Ersatz des Zahns jeweils nach optischer Digitalisierung und die DVT-Aufnahme. Das Erstellen einer DVT-Schablone ist bei diesem Verfahren nicht erforderlich, da die digitalen Modelldaten in das DVT eingeordnet werden.
Zum Abschluss der Implantatplanung erfolgte die Umsetzung der Positionen im CAD/CAM-Verfahren – in eine aus einem Kunststoffmaterial gedruckte Bohrschablone (2ingis S.A., Brüssel, Belgien). Alle Planungsschritte wurden von einer Person, die später auch die Implantation durchführte, festgelegt.
Die Planung wird aus dem Programm SMOP heraus als STL-Datensatz exportiert und gespeichert. Dieser Datensatz gibt die exakt geplante Implantatposition und die anatomischen Nachbarstrukturen wieder.
Implantation
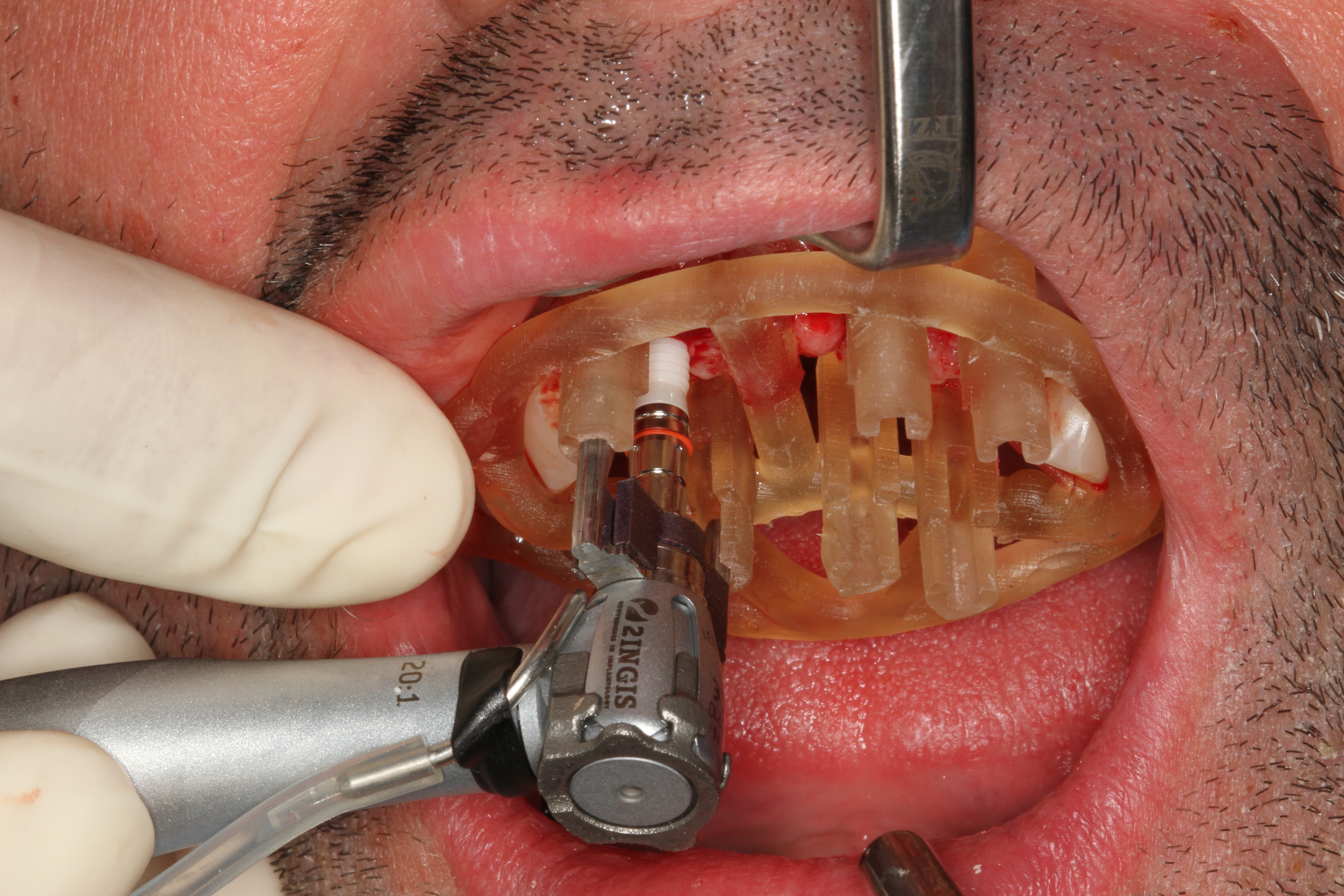
Die Implantation der einteiligen Keramikimplantate erfolgte in lokaler Betäubung nach einem standardisierten Verfahren gemäß den Vorschriften des Herstellers. Die Aufbereitung der Implantatbetten und das Einbringen der Implantate erfolgten vollständig schablonengeführt (Abb. 1–7). Diese Implantate heilen systembedingt offen ein. Bei einer ausreichend dimensionierten keratinisierten Gingiva und ausreichend ortsständigem Knochen wurde ohne Bildung eines Lappens implantiert. Waren diese Voraussetzungen nicht erfüllt, wurde ein Lappen gebildet. Nach der Implantation erfolgte der Wundverschluss mittels Einzelknopfnähten.
Auswertungsverfahren
Durch Überlagerung der geplanten Implantatposition (Proposed implant position [IP]) und der tatsächlich erreichten Position (implant position realized [IR]) wurden die Abweichungen ermittelt. Die geplanten 3D-Positionen der Implantate wurden als 3D-Planungsdatensätze im STL-Format aus der Planungssoftware (SMOP) exportiert. Die erzielten klinischen Implantatpositionen wurden mittels der Abformung unmittelbar nach der Implantatinsertion ermittelt. Dazu wird unmittelbar nach dem Nahtverschluss eine Abformung mit einem auf das Implantat aufgesetzten Übertragungspfosten durchgeführt. Die Abformung erfolgte mit einem individuellen Löffel und einem schnellabbindenden Vinylpolysiloxan. Die geplante Situation wurde mit der erreichten Position im Programm Geomagic Studio (Version 9, Geomagic, NC, USA) überlagert. Die verschiedenen Messungen wurden dann in dem Programm Surfacer, Version 10.6 (SDRC Imageware, Neu-Isenburg, Deutschland) durchgeführt. Das Verfahren wurde an anderer Stelle ausführlich beschrieben.28 Zur Bestimmung der Abweichungen zwischen der geplanten und der erreichten Implantatposition wurden folgende Parameter ausgewertet (Abb. 8).
Radiale Abweichung
Es wurde die dreidimensionale Abweichung zwischen der Mittelachse der geplanten und der tatsächlich erreichten Implantatposition an der krestalen Implantatschulter (xc) und am Apex des Implantats (xa) gemessen.
Höhenabweichung
Die vertikale Abweichung (xh) an der Implantatschulter wurde im Mittelpunkt der krestalen Implantatoberfläche gemessen.
Achsabweichung
Der Winkel (ANG) zwischen der geplanten Implantatachse und der tatsächlich erreichten Achse wurde bestimmt.
Statistische Auswertung
Die statistische Analyse der erfassten Daten erfolgte mit der Software SPSS (IBM SPSS Statistics22, SPSS Inc., Chicago, IL, USA). Es wurde eine explorative Diagnostik zur deskriptiven Darstellung des Patientenguts sowie der quantitativen und qualitativen Analyse der Implantatposition durchgeführt. Es erfolgte eine Überprüfung auf mögliche signifikante Unterschiede der Ergebnisse nach Gruppenbildungen entsprechend der Insertionsregionen (Oberkiefer vs. Unterkiefer und Prämolaren vs. Molaren) mittel des Mann-Whitney-U Tests.
Ergebnisse
An der Studie nahmen zwölf Patienten im Alter von 23–66 Jahren teil. Zwei Studienteilnehmer waren Männer, die weiteren zehn Patienten waren Frauen. Insgesamt wurden in 13 Kiefern 20 Implantate inseriert. Die Implantate verteilten sich auf die Regionen, wie in Tab. 1 dargestellt. Die verwendeten Implantatlängen und Durchmesser sind in Tabelle 2 wiedergegeben.
Metrische Analyse
Die Auswertung der Abweichungen von der geplanten bis zur erreichten Implantatposition von zeigt Tabelle 3. Die Gruppenvergleiche nach Regionen (Oberkiefer vs. Unterkiefer und Prämolaren vs. Molaren) zeigten in allen Parametern keine signifikanten Unterschiede. Der Arbeitsablauf der Insertion konnte bei allen Implantationen vollständig eingehalten werden. Das heißt, sämtliche Schritte der Implantatbettpräparation, wie auch das Einbringen des Implantates selbst, wurden mithilfe der Schablone durchgeführt. Nach Abnahme der Schablone wurde keine Veränderung mehr in der Implantatposition vorgenommen. Bei der Operation traten keine technischen Komplikationen auf. Alle Schablonen zeigten einen guten bis sehr guten Halt auf den Restzähnen.
Diskussion
Schneider et al. stellten in ihrer Übersichtsarbeit berechnete mittlere Abweichungen aus klinischen humanen Studien am krestalen Austrittspunkt von 1.16 mm (95 % CI 0.92-1.39 mm) und apikal 1.96 mm (95 % CI 1.33 – 3.58 mm) vor. Bei der Winkelabweichung nennen sie als Mittelwert 5.73° (95 % CI: 3.96° – 7.49°).5 Die in der vorliegenden Studie gemessenen Ergebnisse zeigen in allen Parametern, neben einer deutlich höheren Genauigkeit auch deutlich geringere Standardabweichungen.
Hülsengeführte Implantationen unterliegen einer vom jeweiligen System abhängigen, nicht vermeidbaren Ungenauigkeit. Damit eine klinisch anwendbare Bohrerführung in der Hülse möglich ist, muss hier eine Gleitpassung stattfinden. Dieser notwenige Freiraum des Bohrers in der Hülse führt zu systemimmanenten Winkelabweichungen. In einer Studie wird diese Toleranz mit einer Winkelabweichung von 2.29° angegeben.29 Systembedingte Winkelabweichungen durch diesen Freiraum in der Bohrhülse werden mit einem Maximum von 5.2° beschrieben. Daraus ergeben sich bei 13 mm langen Implantaten maximale Abweichungen von 1.3 mm an der Implantatschulter und 2.4 mm am Apex der Implantate.30 Da die Hülsen- und Bohrerkonfiguration abhängig vom Implantattyp ist, ergeben sich herstellerabhängig unterschiedliche Einflüsse auf die Genauigkeit. Dieser technische Einfluss ist bei einem hülsenlosen Verfahren nicht gegeben.
Bei dem Vergleich mit anderen Studien kommt erschwerend hinzu, dass in zahlreichen Untersuchungen die Implantation unter Laborbedingungen an Modellen oder anatomischen Präparaten durchgeführt wurden.31-35 Die hierbei erzielten Ergebnisse auf die klinischen Untersuchungen zu übertragen, kann nur mit Einschränkungen erfolgen. Die Ergebnisse solcher In-vitro-Operationen können jedoch als Vergleichswerte der maximal erreichbaren Genauigkeit eines Systems bewertet werden. So wurden beispielsweise mit einem hülsengeführten System am Modellversuch mittlere Abweichungen krestal von 0.72 mm (SD: +/- 0.22, Min: 0.01mm, Max: 2.46 mm), apikal 0.58 (SD: +/- 0.32, Min: 0.00, Max: 1.14 mm), einer vertikalen Abweichungen von 0.27 (SD: +/- 0.22, Min: 0.00mm, Max: 1.02 mm) und einer mittleren Winkelabweichung von 1.90° (SD: +/- 1.54, Min: 0.00°, Max: 8.90°) gemessen. Bover-Ramos et al. zeigten in ihrer Übersichtsarbeit, dass die Genauigkeit bei Untersuchungen an Modellen und anatomischen Präparaten höher ist als bei klinischen Untersuchungen.36,37
Das Problem der großen Abweichungen zeigt sich auch in weiteren Untersuchungen. So konnten beispielsweise Cassetta et al. in einer klinischen Studie krestal mittlere Abweichungen von 1.47 mm (SD: +/- 0.68 mm, Min: 0.17 mm, Max: 3.88 mm), apikal 1.83 mm (SD: +/- 1.03 mm Min: 0.07 mm, Max: 6.41 mm) und eine mittlere Winkelabweichung von 5.09° (SD: +/- 3.70°, Min: 0.10°, Max: 21.16°) feststellen.38 Solche Ergebnisse sind aus chirurgischer Sicht kritisch zu beurteilen, da ein Einhalten von Sicherheitsabständen zur Schonung anatomisch wichtiger Regionen kaum einzuhalten ist. Aber auch die prothetische Versorgbarkeit ist bei der Verwendung einteiliger Implantatsysteme bei solchen Streuungen in der Genauigkeit nicht vorhersagbar. Die in dieser Studie verwendeten Abutments haben einen Konuswinkel von 4°, bei einer Höhe von 4.5 mm. Die Versorgung mit Brücken, ohne dass nachträglich die Implantate intraoral beschliffen werden müssen, setzt daher eine nahezu parallele Ausrichtung der Implantate voraus. Das hier vorgestellte Verfahren mit einer mittleren Winkelabweichung von 2.85° und einem 95 Prozent Konfidenzintervall (2,18°–3,51°), erlaubt damit eine vorhersagbare Versorgungsmöglichkeit auch mit Brückenkonstruktionen.
Das in dieser Studie verwendete Schablonendesign kann auch zu einer Reduktion der Kosten bei schablonengeführten Implantatinsertionen führen. Es fallen keine Materialkosten für die Hülsen an. Ein weiterer Beitrag zur Kostenreduktion ist, dass die Bohrer aus der nicht schablonengeführten Aufbereitung verwendet werden können.
Bildergalerie (11)










Literatur:
- Park C, Raigrodski AJ, Rosen J, Spiekerman C, London RM. Accuracy of implant placement using precision surgical guides with varying occlusogingival heights: an in vitro study. J Prosthet Dent 2009;101:372-81.
- Behneke A, Burwinkel M, Behneke N. Factors influencing transfer accuracy of cone beam CT-derived template-based implant placement. Clin Oral Implants Res 2012;23:416-23.
- Nickenig HJ, Wichmann M, Hamel J, Schlegel KA, Eitner S. Evaluation of the difference in accuracy between implant placement by virtual planning data and surgical guide templates versus the conventional free-hand method - a combined in vivo - in vitro technique using cone-beam CT (Part II). J Craniomaxillofac Surg 2010;38:488-93.
- Rungcharassaeng K, Caruso JM, Kan JY, Schutyser F, Boumans T. Accuracy of computer-guided surgery: A comparison of operator experience. J Prosthet Dent 2015;114:407-13.
- Schneider D, Marquardt P, Zwahlen M, Jung RE. A systematic review on the accuracy and the clinical outcome of computer-guided template-based implant dentistry. Clin Oral Implants Res 2009;20 Suppl 4:73-86.
- Tahmaseb A, Wismeijer D, Coucke W, Derksen W. Computer technology applications in surgical implant dentistry: a systematic review. Int J Oral Maxillofac Implants 2014;29 Suppl:25-42.
- Reyes A, Turkyilmaz I, Prihoda TJ. Accuracy of surgical guides made from conventional and a combination of digital scanning and rapid prototyping techniques. J Prosthet Dent 2015;113:295-303.
- Kuhl S, Payer M, Zitzmann NU, Lambrecht JT, Filippi A. Technical accuracy of printed surgical templates for guided implant surgery with the coDiagnostiX software. Clin Implant Dent Relat Res 2015;17 Suppl 1:e177-82.
- Kernen F, Benic GI, Payer M, et al. Accuracy of Three-Dimensional Printed Templates for Guided Implant Placement Based on Matching a Surface Scan with CBCT. Clin Implant Dent Relat Res 2016;18:762-8.
- Geng W, Liu C, Su Y, Li J, Zhou Y. Accuracy of different types of computer-aided design/computer-aided manufacturing surgical guides for dental implant placement. Int J Clin Exp Med 2015;8:8442-8449.
- Turbush SK, Turkyilmaz I. Accuracy of three different types of stereolithographic surgical guide in implant placement: an in vitro study. J Prosthet Dent 2012;108:181-8.
- Raico Gallardo YN, da Silva-Olivio IR, Mukai E, Morimoto S, Sesma N, Cordaro L. Accuracy comparison of guided surgery for dental implants according to the tissue of support: a systematic review and meta-analysis. Clin Oral Implants Res 2016.
- Behneke A, Burwinkel M, Knierim K, Behneke N. Accuracy assessment of cone beam computed tomography-derived laboratory-based surgical templates on partially edentulous patients. Clin Oral Implants Res 2012;23:137-43.
- Schnutenhaus S, Edelmann C, Rudolph H, Dreyhaupt J, Luthardt RG. 3D accuracy of implant positions in template-guided implant placement as a function of the remaining teeth and the surgical procedure: a retrospective study. Clin Oral Investig 2018.
- Zhao XZ, Xu WH, Tang ZH, Wu MJ, Zhu J, Chen S. Accuracy of computer-guided implant surgery by a CAD/CAM and laser scanning technique. Chin J Dent Res 2014;17:31-6.
- Naziri E, Schramm A, Wilde F. Accuracy of computer-assisted implant placement with insertion templates. GMS Interdiscip Plast Reconstr Surg DGPW 2016;5:Doc15.
- Beretta M, Poli PP, Maiorana C. Accuracy of computer-aided template-guided oral implant placement: a prospective clinical study. J Periodontal Implant Sci 2014;44:184-93.
- Alzoubi F, Massoomi N, Nattestad A. Accuracy Assessment of Immediate and Delayed Implant Placements Using CAD/CAM Surgical Guides. J Oral Implantol 2016.
- Scherer U, Stoetzer M, Ruecker M, Gellrich NC, von See C. Template-guided vs. non-guided drilling in site preparation of dental implants. Clin Oral Investig 2015;19:1339-46.
- Vercruyssen M, Cox C, Coucke W, Naert I, Jacobs R, Quirynen M. A randomized clinical trial comparing guided implant surgery (bone- or mucosa-supported) with mental navigation or the use of a pilot-drill template. J Clin Periodontol 2014;41:717-23.
- Aglietta M, Siciliano VI, Zwahlen M, et al. A systematic review of the survival and complication rates of implant supported fixed dental prostheses with cantilever extensions after an observation period of at least 5 years. Clin Oral Implants Res 2009;20:441-51.
- Broggini N, McManus LM, Hermann JS, et al. Peri-implant inflammation defined by the implant-abutment interface. J Dent Res 2006;85:473-8.
- Jaworski ME, Melo AC, Picheth CM, Sartori IA. Analysis of the bacterial seal at the implant-abutment interface in external-hexagon and Morse taper-connection implants: an in vitro study using a new methodology. Int J Oral Maxillofac Implants 2012;27:1091-5.
- Abrahamsson I, Berglundh T, Lindhe J. The mucosal barrier following abutment dis/reconnection. An experimental study in dogs. J Clin Periodontol 1997;24:568-72.
- World Medical Association. World Medical Association Declaration of Helsinki. Ethical principles for medical research involving human subjects. Nurs Ethics 2002;9:105-9.
- ISO (International Organization for Standardization). ISO 14155:2011. Clinical investigation of medical devices for human subjects -- Good clinical practice. 2011; Available from: https://www.iso.org/standard/45557.html.
- European Commission. DIRECTIVE 2001/20/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 4 April 2001 on the approximation of the laws, regulations and administrative provisions of the Member States relating to the implementation of good clinical practice in the conduct of clinical trials on medicinal products for human use. 2001; Available from: https://ec.europa.eu/health/human-use/clinical-trials/directive_en.
- Schnutenhaus S, Edelmann C, Rudolph H, Luthardt RG. Retrospective study to determine the accuracy of template-guided implant placement using a novel nonradiologic evaluation method. Oral Surg Oral Med Oral Pathol Oral Radiol 2016;121:e72-9.
- Valente F, Schiroli G, Sbrenna A. Accuracy of computer-aided oral implant surgery: a clinical and radiographic study. Int J Oral Maxillofac Implants 2009;24:234-42.
- Koop R, Vercruyssen M, Vermeulen K, Quirynen M. Tolerance within the sleeve inserts of different surgical guides for guided implant surgery. Clin Oral Implants Res 2013;24:630-4.
- Van Assche N, van Steenberghe D, Guerrero ME, et al. Accuracy of implant placement based on pre-surgical planning of three-dimensional cone-beam images: a pilot study. J Clin Periodontol 2007;34:816-21.
- Ruppin J, Popovic A, Strauss M, Spuntrup E, Steiner A, Stoll C. Evaluation of the accuracy of three different computer-aided surgery systems in dental implantology: optical tracking vs. stereolithographic splint systems. Clin Oral Implants Res 2008;19:709-16.
- Viegas VN, Dutra V, Pagnoncelli RM, de Oliveira MG. Transference of virtual planning and planning over biomedical prototypes for dental implant placement using guided surgery. Clin Oral Implants Res 2010;21:290-5.
- Kuhl S, Zurcher S, Mahid T, Muller-Gerbl M, Filippi A, Cattin P. Accuracy of full guided vs. half-guided implant surgery. Clin Oral Implants Res 2013;24:763-9.
- Bell CK, Sahl EF, Kim YJ, Rice DD. Accuracy of Implants Placed with Surgical Guides: Thermoplastic Versus 3D Printed. Int J Periodontics Restorative Dent 2018;38:113-119.
- Dreiseidler T, Tandon D, Ritter L, et al. Accuracy of a newly developed open-source system for dental implant planning. Int J Oral Maxillofac Implants 2012;27:128-37.
- Bover-Ramos F, Vina-Almunia J, Cervera-Ballester J, Penarrocha-Diago M, Garcia-Mira B. Accuracy of Implant Placement with Computer-Guided Surgery: A Systematic Review and Meta-Analysis Comparing Cadaver, Clinical, and In Vitro Studies. Int J Oral Maxillofac Implants 2018;33:101-115.
- Cassetta M, Stefanelli LV, Giansanti M, Calasso S. Accuracy of implant placement with a stereolithographic surgical template. Int J Oral Maxillofac Implants 2012;27:655-63.
Zusammenfassung:
Im Rahmen dieser klinischen Studie können die folgenden Schlussfolgerungen gezogen werden:
- Die Anwendung einer hülsenlosen Bohrschablone führt zu einer guten Genauigkeit bei der Insertion von Implantaten.
- Es konnte eine höhere Genauigkeit in allen Parametern im Vergleich zu den angegebenen Mittelwerten von hülsengeführten Bohrschablonen in systematischen Übersichtsarbeiten bei vergleichbaren klinischen Studien ermittelt werden. Die klinisch kritischen Maximalwerte waren zudem deutlich geringer als in diesen beschriebenen Studien.
- Mit dem vorgestellten Verfahren konnten geringe Streuungen der Messwerte gezeigt werden. Die klinische Relevanz daraus ist eine gute Vorhersagbarkeit der prothetischen Versorgungsmöglichkeit.
- Insbesondere für einteilige Implantatsysteme muss eine hohe Genauigkeit bei der Implantatinsertion gefordert werden, da Abweichungen deutlich schwerer kompensiert werden können als bei zweiteiligen Systemen. Das hülsenlose Implantatbohrprotokoll erscheint daher für die Indikation geeignet zu sein.
Erstpublikation de Ergebnisse: Int J Comput Dent. 2018;21(2):97-105. Precision of sleeveless 3D drill guides for insertion of one-piece ceramic implants: a prospective clinical trial. Schnutenhaus S, von Koenigsmarck V, Blender S, Ambrosius L, Luthardt RG, Rudolph H.
Danksagung: Wir danken der Firma VITA Zahnfabrik H. Rauter GmbH, Bad Säckingen, Deutschland, für die anteilige Förderung der Studie. Ebenso danken wir der Firma 2ingis S.A., Brüssel, Belgien, für ihre Unterstützung.